|
|
(26 intermediate revisions by 3 users not shown)
|
| Line 1: |
Line 1: |
| − | Warnung: RPi Unterstützung sollte als experimentell betrachtet werden. Bereiten Sie sich darauf vor auf Probleme zu stoßen, wenn Sie GIMX auf dem RPi nutzen möchten. | + | <languages /> |
| | + | Warnung: RPi Unterstützung sollte als experimentell betrachtet werden.Es kann zu Problemen kommen, wenn GIMX auf dem RPi ausgeführt werden soll. |
| | | | |
| − | GIMX can run on many Linux targets, and the [http://www.raspberrypi.org/ the Raspberry Pi] is one of them! | + | GIMX läuft unter verschiedenen Linux Geräten und der [http://www.raspberrypi.org/ Raspberry Pi] ist einer davon ! |
| − | == Tested setup == | + | =Hardware Empfehlungen= |
| − | * Raspberry Pi: model B, 256MB
| |
| − | * Distro: [http://www.raspberrypi.org/downloads Raspbian Jessie] (2015-09-24)
| |
| − | * '''Self-powered USB hub''': Belkin 7 ports F4U017 (self-powered = with an external power supply)
| |
| − | * Keyboard: n25te plugged on the USB hub
| |
| − | * Mouse: Logitech G500 plugged on the USB hub
| |
| − | * PS3: FAT - FW 4.41
| |
| | | | |
| − | * Bluetooth dongle: Pluscom BT20 (CSR Bluecore4-rom) plugged on the USB hub
| + | Nutze nur einen USB HUB wenn am RPi keine resp. zu wenige Ports verfügbar sind.<br /> |
| | + | Es ist empfehlenswert einen USB HUB mit externer Stromversorgung zu nutzen. |
| | | | |
| − | * DIY USB adapter: Teensy 2.0 + CP2102 plugged on the USB hub
| + | ==Firmware aktualisierung== |
| | + | Erste Firmwares hatten Probleme mit den USB Ports, deshalb ist es empfehlenswert die Firmware Updates vor der Nutzung von GIMX durchzuführen.<br /> |
| | + | Die Firmware zu aktualisieren kann auch hilfreich sein, wenn geplant ist ein Logitech Force Feedback Wheel einzusetzen (Das uhid Kernel Modul fehlte in früheren Firmwares).<br /> |
| | + | Folgende befehle ausführen (Terminal/SSH): |
| | + | <pre>sudo rpi-update |
| | + | sudo reboot</pre> |
| | | | |
| − | == Firmware update ==
| + | Falls Probleme mit der aktuellsten Firmware auftreten, sollte diese installiert werden: |
| − | As early firmwares had severe USB issues it is recommended to update the firmware before using GIMX.<br />
| + | <pre>sudo rpi-update 771a503cfc2a1130e2df2a4ddfc45ffa0f592b3f |
| − | Updating the firmware may also be useful if you plan to use a Logitech force feedback wheel (the uhid kernel module was missing in earlier firmwares).<br />
| + | sudo reboot</pre> |
| − | Type the following command:
| + | Getestete RPi Firmware: |
| − | <pre>sudo rpi-update</pre> | |
| − | And don't forget to reboot:
| |
| − | <pre>sudo reboot</pre>
| |
| − | Tested Rpi firmware:
| |
| | <pre>pi@raspberrypi ~ $ uname -a | | <pre>pi@raspberrypi ~ $ uname -a |
| − | Linux raspberrypi 4.1.9+ #819 PREEMPT Thu Oct 1 20:31:26 BST 2015 armv6l | + | Linux raspberrypi 4.1.21+ #873 Mon Apr 11 18:00:37 BST 2016 armv6l GNU/Linux</pre> |
| − | GNU/Linux</pre> | + | <!--== UHID Kernel Modul == |
| − | <!--== UHID kernel module == | |
| | | | |
| | If you plan to use a Logitech force feedback wheel, you will have to build the uhid.ko module for your kernel.<br /> | | If you plan to use a Logitech force feedback wheel, you will have to build the uhid.ko module for your kernel.<br /> |
| Line 57: |
Line 53: |
| | sudo cp dest/include/linux/uhid.h /usr/include/linux/--> | | sudo cp dest/include/linux/uhid.h /usr/include/linux/--> |
| | | | |
| − | == GIMX installation == | + | ==USB Adapter mithilfe der On-Board UART Schnittstelle== |
| − | <pre>sudo apt-get install gdebi
| |
| − | wget http://gimx.fr/download/gimx-raspbian -O gimx.deb
| |
| − | sudo gdebi gimx.deb</pre>
| |
| − | | |
| − | If you get a "Dependency is not satisfiable: ..." error message, upgrade Raspbian:
| |
| − | <pre>sudo apt-get update && sudo apt-get upgrade</pre>
| |
| − | | |
| − | == Stop/disable triggerhappy service ==
| |
| − | [https://github.com/wertarbyte/triggerhappy/blob/master/README Triggerhappy] is a daemon that opens every input device for reading, and that consumes a few percent of the CPU time.
| |
| − | | |
| − | It seems a good idea to stop it while running GIMX.
| |
| − | | |
| − | To stop triggerhappy:
| |
| − | sudo service triggerhappy stop
| |
| − | To disable triggerhappy:
| |
| − | sudo update-rc.d triggerhappy disable
| |
| − | | |
| − | == Run GIMX ==
| |
| − | Read the [[Quick_Start|Quick start page]] to learn how to run GIMX through the GUI.<br />
| |
| − | A good idea is to run GIMX directly from a terminal, without starting a graphical session.<br />
| |
| − | This can be done over the network, using a ssh client.<br />
| |
| − | Ideally, GIMX should be launched without using the Ethernet port (because it is connected on the USB bus).<br />
| |
| − | More details on command line options on [[Command_line|this page]].<br />
| |
| − | === Bluetooth ===
| |
| − | In a terminal:
| |
| − | gimx -t Sixaxis -c <config file> -b <PS3 bdaddr>
| |
| − | The dongle address has to be changed before running the above commands.
| |
| − | | |
| − | === DIY USB adapter === | |
| − | In einem Terminal:
| |
| − | gimx -c <config file> -p /dev/<ttyUSB port>
| |
| | | | |
| | + | ===Hardware Anforderungen=== |
| | | | |
| − | === Without DIY USB adapter (RU) ===
| + | <b>ACHTUNG DIES IST EINE ÜBERSETZUNG - Bei unklarheiten das Original in Englisch durch lesen!</b> |
| | | | |
| − | ====Подготовка RPi==== | + | Das On-Board UART läuft mit Spannungen von 0V/3.3V, das AVR USB-Board muss mit einer Spannung von 5V und 16MHz laufen (Spannungen von 3.3V würden nur mit 8MHz arbeiten).<br /> |
| | + | Das direkte Verbinden der RPi mit dem AVR USB-Board könnte die Hardware beschädigen! |
| | + | Eine günstige Lösung ist es einen Spannungsteiler zu verwenden:<br /> |
| | + | * Beide GNDs verbinden |
| | + | * Es ist sicher den TXD Pin der RPI mit dem Rx Pin vom AVR USB-Board zu verbinden (Die GIMX Firmware konfiguriert den Rx Pin als eingabe) |
| | + | *Um den Tx pin vom AVR USB-Board zum RXD pin der RPi zu verbinden, muss man die Spannung von 0..5V auf 0..3.3V anpassen.<br /> |
| | + | Dies kann mit einem Spannungsteiler gemacht werden: |
| | + | <div class="image200px">[https://gimx.fr/img/wiki/Resistive_divider.png https://gimx.fr/img/wiki/Resistive_divider.png]</div> |
| | + | Vin ist der TX Pin vom AVR USB-Board, Vout ist der RXD Pin der RPi, R1=2.2kΩ , R2=3.3kΩ |
| | + | *Keine anderen Pins verbinden ! |
| | | | |
| − | Нам подойдет любая из моделей RPi:
| + | ===Software Einstellungen=== |
| − | Raspberry Pi A+
| |
| − | Raspberry Pi B
| |
| − | Raspberry Pi B+
| |
| − | Raspberry Pi 2
| |
| − | Raspberry Pi Zero
| |
| | | | |
| − | По умолчанию RPi отправляет отладочные сообщения на последовательный порт.
| + | Standardmässig ist der RPi UART als Serielle Konsole konfiguriert.<br /> |
| − | Что бы использовать последовательный порт для своих нужд необходимо выполнить команду в терминале:
| + | Deaktivierung der Seriellen Konsole mittels raspi-config: |
| | <pre> | | <pre> |
| | sudo raspi-config | | sudo raspi-config |
| | </pre> | | </pre> |
| − | Откроется gрограмма конфигурации
| + | Dann folgendes auswählen: |
| − | Выберем пункт:
| |
| | <pre> | | <pre> |
| − | "Advanced Options" затем выберем "Serial" затем "No" затем "Finish" | + | "Advanced Options", "Serial", "No", "Finish" |
| | </pre> | | </pre> |
| − | Но этого не достаточно. По умолчанию частота последовательного порта 3 MHz поднимем её до 8 MHz.
| + | Die Standardkonfiguration erlaubt keine hohe Baudrate.<br /> |
| − | Выполним команду в терминале:
| + | Hohe Baudrate durch das anpassen von /boot/config.txt aktivieren: |
| | <pre> | | <pre> |
| | sudo nano /boot/config.txt | | sudo nano /boot/config.txt |
| | </pre> | | </pre> |
| − | Добавим строку (если она существует просто поправте ее значение)
| + | Folgende Zeile am Schluss der Datei hinzufügen: |
| | <pre> | | <pre> |
| | init_uart_clock=8000000 | | init_uart_clock=8000000 |
| | </pre> | | </pre> |
| − | Установим GIMX для этого выполним последовательно команды в терминале:
| + | Neustart um die Änderungen wirksam zu machen: |
| | <pre> | | <pre> |
| − | sudo apt-get install gdebi
| |
| − | wget http://gimx.fr/download/gimx-raspbian -O gimx.deb
| |
| − | sudo gdebi gimx.deb
| |
| − | sudo service triggerhappy stop
| |
| − | sudo update-rc.d triggerhappy disable
| |
| | sudo reboot | | sudo reboot |
| | </pre> | | </pre> |
| − | После того как перезагрузится RPi (если она загрузится не в X) выполним команду в терминале:
| + | |
| | + | ==GIMX Installation== |
| | + | <pre>wget https://gimx.fr/download/gimx-raspbian -O gimx.deb |
| | + | sudo dpkg -i gimx.deb |
| | + | sudo apt-get -f install</pre> |
| | + | |
| | + | If you get a "Dependency is not satisfiable: ..." error message, upgrade Raspbian: |
| | + | <pre>sudo apt-get update && sudo apt-get upgrade</pre> |
| | + | |
| | + | ==Triggerhappy Dienst stoppen/deaktivieren== |
| | + | [https://github.com/wertarbyte/triggerhappy/blob/master/README Triggerhappy] ist ein dienst der jedes Eingabegerät zum lesen öffnet und dadurch etwas an CPU Zeit resp. Leistung verbraucht. |
| | + | |
| | + | Es ist von vorteil den Dienst zu beenden, wenn GIMX benutzt wird. |
| | + | |
| | + | Um Triggerhappy zu stoppen: |
| | + | <pre>sudo service triggerhappy stop</pre> |
| | + | Um Triggerhappy zu deaktivieren: |
| | + | <pre>sudo update-rc.d triggerhappy disable</pre> |
| | + | |
| | + | ==GIMX Starten== |
| | + | Den [[Quick_Start|Quick start page]] lesen um GIMX mit Benutzeroberfläche zu starten.<br /> |
| | + | Es ist eine gute Idee GIMX direkt via Terminal, ohne grafische Oberfläche zu starten. Dies kann über Netzwerk, mit einem SSH Client oder mittels [[#Autostart GIMX at boot without GUI]] bewerkstelligt werden<br /> |
| | + | |
| | + | Idealerweise sollte GIMX nicht via Netzwerkport gestartet werden (Da es an der USB Schnittstelle verbunden ist).<br /> |
| | + | Weitere Informationen für Terminalbefehle [[Command_line|this page]].<br /> |
| | + | |
| | + | ==Automatisches starten von GIMX ohne Benutzeroberfläche== |
| | + | Als root /etc/systemd/system/gimx.service Datei mit folgendem Inhalt erstellen: |
| | + | |
| | <pre> | | <pre> |
| − | startx
| + | [Unit] |
| | + | Description=GIMX |
| | + | After=syslog.target network.target |
| | + | |
| | + | [Service] |
| | + | User=pi |
| | + | Type=simple |
| | + | ExecStart=/usr/bin/gimx -p /dev/ttyUSB0 -c LogitechDrivingForceGT_G29.xml --nograb |
| | + | Restart=always |
| | + | RestartSec=5 |
| | + | |
| | + | [Install] |
| | + | WantedBy=multi-user.target |
| | </pre> | | </pre> |
| − | И сделаем ссылку на AMA0
| + | |
| | + | ttyUSB0 mit deinem Gerät ersetzen und LogitechDrivingForceGT_G29.xml mit deiner Konfigurationsdatei ersetzen (welche im pi home Verzeichnis liegen sollte: /home/pi/.gimx/config/LogitechDrivingForceGT_G29.xml). |
| | + | |
| | + | Ausführen: <pre>sudo systemctl daemon-reload</pre> Um systemd die neue Datei bekannt zu machen und <pre>sudo systemctl enable gimx && sudo systemctl start gimx</pre> um den GIMX Dienst automatisch zu starten. |
| | + | |
| | + | == Notify when GIMX is running using a led == |
| | + | In order to have a proper confirmation about if the gimx service is up and running, you can add a simple python script that turns a led on if the gimx service is running. |
| | + | |
| | + | The file will be located at /home/pi/blink.py: |
| | + | |
| | <pre> | | <pre> |
| − | sudo ln -s /dev/ttyAMA0 /dev/ttyUSB0
| + | #!/usr/bin/python |
| − | </pre>
| + | import os |
| | + | import time |
| | + | import RPi.GPIO as GPIO |
| | + | |
| | + | led = 23 |
| | + | button = 18 |
| | + | GPIO.setmode(GPIO.BCM) |
| | + | GPIO.setup(led, GPIO.OUT) |
| | + | GPIO.setup(button, GPIO.IN, pull_up_down = GPIO.PUD_UP) |
| | + | |
| | + | def Shutdown(channel): |
| | + | GPIO.output(led, True) |
| | + | time.sleep(0.2) |
| | + | GPIO.output(led, False) |
| | + | time.sleep(0.2) |
| | + | GPIO.output(led, True) |
| | + | time.sleep(0.2) |
| | + | GPIO.output(led, False) |
| | + | os.system("sudo shutdown -h now") |
| | | | |
| − | ==== Подготовка Teensy ==== | + | GPIO.add_event_detect(18, GPIO.FALLING, callback = Shutdown, bouncetime = 2000) |
| | | | |
| − | Нам подойдут
| + | while True: |
| − | Teensy 2.0
| + | found = False |
| − | Teensy++ 2.0
| + | time.sleep(5) |
| | + | pids = [pid for pid in os.listdir('/proc') if pid.isdigit()] |
| | + | for pid in pids: |
| | + | try: |
| | + | cmd = open(os.path.join('/proc', pid, 'cmdline'), 'rb').read() |
| | + | if "gimx" in cmd: |
| | + | found = True |
| | + | except IOError: # proc has already terminated |
| | + | continue |
| | + | if found == True: |
| | + | GPIO.output(led, True) |
| | + | else: |
| | + | GPIO.output(led, False) |
| | + | </pre> |
| | | | |
| − | Следуя инструкции
| + | Als Bonus kann man einen Knopf hinzufügen, welcher beim Drücken einen Blinkeffekt ergibt und den RPi herunterfährt. |
| − | https://www.pjrc.com/teensy/3volt.html
| |
| − | Припаяем MCP1825S-3302E/DB
| |
| − | Это даст нам напряжение на последовательном порту безопасное для RPi
| |
| | | | |
| − | Скачаем нужную нам прошивку
| + | <div class="image200px">[https://gimx.fr/img/wiki/PiButtonLed.png https://gimx.fr/img/wiki/PiButtonLed.png]</div> |
| − | [http://gimx.fr/download/gimx-firmwares Firmwares] | |
| − | Прошьем её с помощью [http://www.pjrc.com/teensy/loader.html Teensy Loader].
| |
| | | | |
| − | ==== Схема подключения ====
| + | To start at boot, simply add it to the pi user crontab (crontab -e) as <pre>@reboot python /home/pi/blink.py &</pre> |
| − | [http://i.imgur.com/zKHfN3F.png http://i.imgur.com/zKHfN3F.png]
| |
| − | [http://i.imgur.com/sdedoFG.jpg http://i.imgur.com/sdedoFG.jpg]
| |
Warnung: RPi Unterstützung sollte als experimentell betrachtet werden.Es kann zu Problemen kommen, wenn GIMX auf dem RPi ausgeführt werden soll.
GIMX läuft unter verschiedenen Linux Geräten und der Raspberry Pi ist einer davon !
Hardware Empfehlungen
Nutze nur einen USB HUB wenn am RPi keine resp. zu wenige Ports verfügbar sind.
Es ist empfehlenswert einen USB HUB mit externer Stromversorgung zu nutzen.
Firmware aktualisierung
Erste Firmwares hatten Probleme mit den USB Ports, deshalb ist es empfehlenswert die Firmware Updates vor der Nutzung von GIMX durchzuführen.
Die Firmware zu aktualisieren kann auch hilfreich sein, wenn geplant ist ein Logitech Force Feedback Wheel einzusetzen (Das uhid Kernel Modul fehlte in früheren Firmwares).
Folgende befehle ausführen (Terminal/SSH):
sudo rpi-update
sudo reboot
Falls Probleme mit der aktuellsten Firmware auftreten, sollte diese installiert werden:
sudo rpi-update 771a503cfc2a1130e2df2a4ddfc45ffa0f592b3f
sudo reboot
Getestete RPi Firmware:
pi@raspberrypi ~ $ uname -a
Linux raspberrypi 4.1.21+ #873 Mon Apr 11 18:00:37 BST 2016 armv6l GNU/Linux
USB Adapter mithilfe der On-Board UART Schnittstelle
Hardware Anforderungen
ACHTUNG DIES IST EINE ÜBERSETZUNG - Bei unklarheiten das Original in Englisch durch lesen!
Das On-Board UART läuft mit Spannungen von 0V/3.3V, das AVR USB-Board muss mit einer Spannung von 5V und 16MHz laufen (Spannungen von 3.3V würden nur mit 8MHz arbeiten).
Das direkte Verbinden der RPi mit dem AVR USB-Board könnte die Hardware beschädigen!
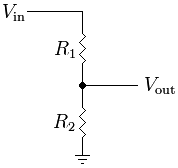
Eine günstige Lösung ist es einen Spannungsteiler zu verwenden:
- Beide GNDs verbinden
- Es ist sicher den TXD Pin der RPI mit dem Rx Pin vom AVR USB-Board zu verbinden (Die GIMX Firmware konfiguriert den Rx Pin als eingabe)
- Um den Tx pin vom AVR USB-Board zum RXD pin der RPi zu verbinden, muss man die Spannung von 0..5V auf 0..3.3V anpassen.
Dies kann mit einem Spannungsteiler gemacht werden:
Vin ist der TX Pin vom AVR USB-Board, Vout ist der RXD Pin der RPi, R1=2.2kΩ , R2=3.3kΩ
- Keine anderen Pins verbinden !
Software Einstellungen
Standardmässig ist der RPi UART als Serielle Konsole konfiguriert.
Deaktivierung der Seriellen Konsole mittels raspi-config:
sudo raspi-config
Dann folgendes auswählen:
"Advanced Options", "Serial", "No", "Finish"
Die Standardkonfiguration erlaubt keine hohe Baudrate.
Hohe Baudrate durch das anpassen von /boot/config.txt aktivieren:
sudo nano /boot/config.txt
Folgende Zeile am Schluss der Datei hinzufügen:
init_uart_clock=8000000
Neustart um die Änderungen wirksam zu machen:
sudo reboot
GIMX Installation
wget https://gimx.fr/download/gimx-raspbian -O gimx.deb
sudo dpkg -i gimx.deb
sudo apt-get -f install
If you get a "Dependency is not satisfiable: ..." error message, upgrade Raspbian:
sudo apt-get update && sudo apt-get upgrade
Triggerhappy Dienst stoppen/deaktivieren
Triggerhappy ist ein dienst der jedes Eingabegerät zum lesen öffnet und dadurch etwas an CPU Zeit resp. Leistung verbraucht.
Es ist von vorteil den Dienst zu beenden, wenn GIMX benutzt wird.
Um Triggerhappy zu stoppen:
sudo service triggerhappy stop
Um Triggerhappy zu deaktivieren:
sudo update-rc.d triggerhappy disable
GIMX Starten
Den Quick start page lesen um GIMX mit Benutzeroberfläche zu starten.
Es ist eine gute Idee GIMX direkt via Terminal, ohne grafische Oberfläche zu starten. Dies kann über Netzwerk, mit einem SSH Client oder mittels #Autostart GIMX at boot without GUI bewerkstelligt werden
Idealerweise sollte GIMX nicht via Netzwerkport gestartet werden (Da es an der USB Schnittstelle verbunden ist).
Weitere Informationen für Terminalbefehle this page.
Automatisches starten von GIMX ohne Benutzeroberfläche
Als root /etc/systemd/system/gimx.service Datei mit folgendem Inhalt erstellen:
[Unit]
Description=GIMX
After=syslog.target network.target
[Service]
User=pi
Type=simple
ExecStart=/usr/bin/gimx -p /dev/ttyUSB0 -c LogitechDrivingForceGT_G29.xml --nograb
Restart=always
RestartSec=5
[Install]
WantedBy=multi-user.target
ttyUSB0 mit deinem Gerät ersetzen und LogitechDrivingForceGT_G29.xml mit deiner Konfigurationsdatei ersetzen (welche im pi home Verzeichnis liegen sollte: /home/pi/.gimx/config/LogitechDrivingForceGT_G29.xml).
Ausführen:
sudo systemctl daemon-reload
Um systemd die neue Datei bekannt zu machen und
sudo systemctl enable gimx && sudo systemctl start gimx
um den GIMX Dienst automatisch zu starten.
Notify when GIMX is running using a led
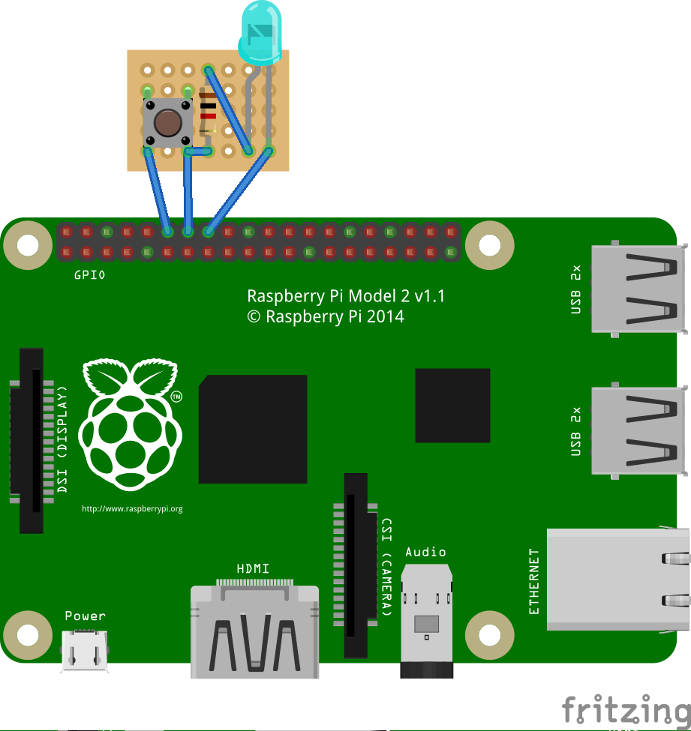
In order to have a proper confirmation about if the gimx service is up and running, you can add a simple python script that turns a led on if the gimx service is running.
The file will be located at /home/pi/blink.py:
#!/usr/bin/python
import os
import time
import RPi.GPIO as GPIO
led = 23
button = 18
GPIO.setmode(GPIO.BCM)
GPIO.setup(led, GPIO.OUT)
GPIO.setup(button, GPIO.IN, pull_up_down = GPIO.PUD_UP)
def Shutdown(channel):
GPIO.output(led, True)
time.sleep(0.2)
GPIO.output(led, False)
time.sleep(0.2)
GPIO.output(led, True)
time.sleep(0.2)
GPIO.output(led, False)
os.system("sudo shutdown -h now")
GPIO.add_event_detect(18, GPIO.FALLING, callback = Shutdown, bouncetime = 2000)
while True:
found = False
time.sleep(5)
pids = [pid for pid in os.listdir('/proc') if pid.isdigit()]
for pid in pids:
try:
cmd = open(os.path.join('/proc', pid, 'cmdline'), 'rb').read()
if "gimx" in cmd:
found = True
except IOError: # proc has already terminated
continue
if found == True:
GPIO.output(led, True)
else:
GPIO.output(led, False)
Als Bonus kann man einen Knopf hinzufügen, welcher beim Drücken einen Blinkeffekt ergibt und den RPi herunterfährt.
To start at boot, simply add it to the pi user crontab (crontab -e) as
@reboot python /home/pi/blink.py &